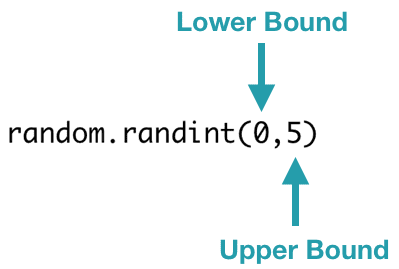
To make the behavior of your robot less predictable, you may want to incorporate some variation so that your robot does something slightly different each time you run the program. To do this, you can use a random number generator. A random number generator is a function that picks a random number each time you call it. In Python, use randint() to pick an integer. This function takes two parameters that define the range of numbers that you are interested in. The first is the lowest number that should be generated, and the second parameter is the highest number that should be generated. For example, this line of code will generate a random number from 0 to 5.