Measuring Motor Speed
Subjects
Math, Science
Project Type
Real World Models
Required Tutorials
Rotation servo
Estimated Time
Short (1-3 hours)
Description
Use a multimeter to determine the speed of a gear motor.
Free Teacher Materials
Project Map
Learning Goals
Students will use a multimeter to determine the speed of a motor.
Materials
- Hummingbird Bit Premium Kit
- Multimeter
- Possible Craft supplies
Tips
- Have students work in groups of 2-3.
- Our Printables page has a variety of documents for making teaching and learning with Hummingbird easier. Visit and explore resources like the My First Robot Design Notebook now.
Steps
The command to the Hummingbird gear motor sets the speed of the motor using a number from 0 to 100. We developed this project to demonstrate how this number controls the voltage supplied to the motor as well as how the rotations per minute of the motor.
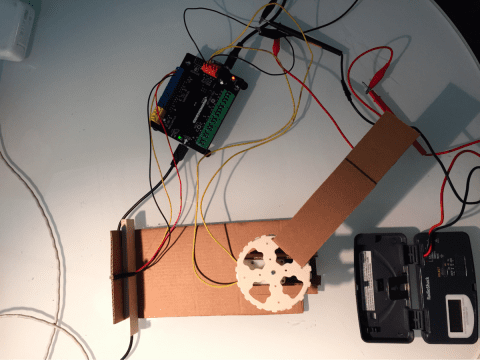
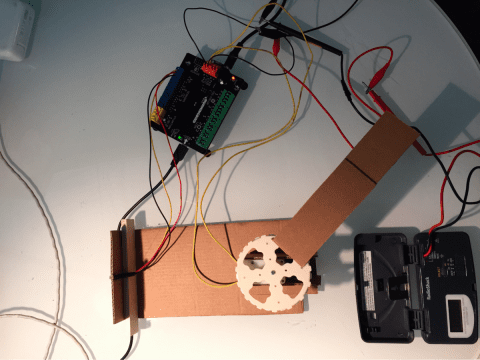
This project uses a gear motor, a light sensor, Scratch, and an inexpensive multimeter. Scratch is used to run the motor at a given command level (20, 30, 40, etc.) for 60 s. A strip of cardboard is attached to the motor. Each rotation of the motor causes the strip of cardboard to pass over the light sensor. The Scratch program detects this movement as a change in the light sensor reading. Specifically, the Scratch program counts the number of times that a light sensor reading is below the threshold and the previous reading was above the threshold. This is displayed on the screen as the variable counts. This project could be simplified by having students simply count the number of rotations of the motor in one minute.
A multimeter is used to measure the voltage supplied to the motor. To accomplish this, we inserted two extra wires into the gear motor ports and used alligator clips to attach these wires to the multimeter. At low motor commands (20-30), the voltage reading may appear to vary between a lower value and a higher value. If this happens, the higher value should be recorded.
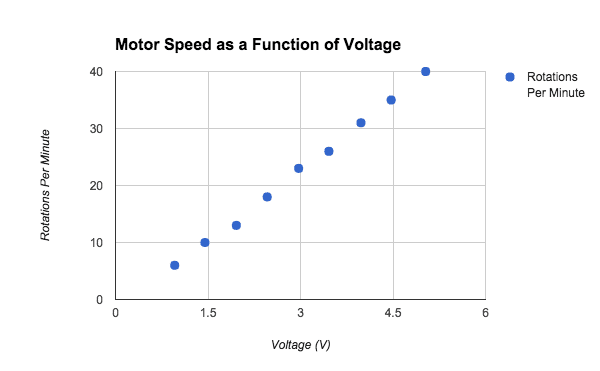
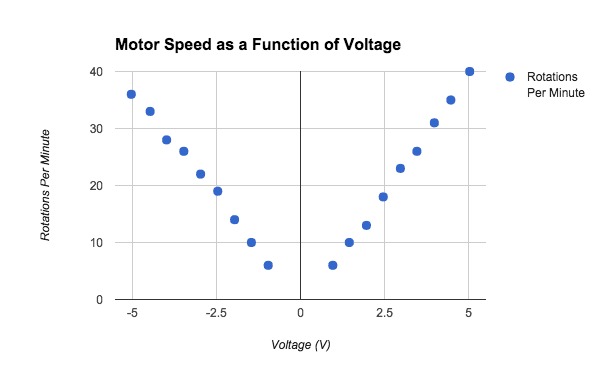
Students can record the voltage and motor speed corresponding to a variety of motor commands. They can then create a scatterplot showing the relationship between voltage and motor speed. Similar plots could be used to investigate the relationship between motor commands and voltage or speed.
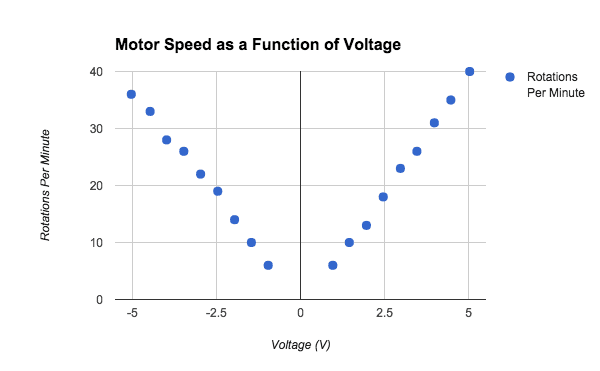
Students could also extend this project to consider negative motor commands. Negative motor commands will result in negative voltages (if the connection to the multimeter remains the same). An example of a graph with negative voltages is shown below. In this graph, all rotations are taken to be positive. Students could also consider the direction of rotation. For example, clockwise rotations could be considered positive and counterclockwise rotations negative. This would results in a linear graph.
This project is presented as a demonstration, but students need not be told to conduct exactly this experiment. Rather, they could be shown how to measure voltage and challenged to design an experiment to measure the relationships among voltage, motor commands, and motor speed.
TECHNICAL NOTES
The motor is actually controlled using pulses of voltage (pulse-width modulation), but the multimeter averages these pulses into a fairly constant voltage reading. However, we believe that these pulses caused the oscillation in the voltage values that we observed at low motor speeds. Students may also notice that voltages near 0 (for example, 10 or -10) do not cause the motor to move. This is because the power to the motor is not enough to overcome the friction of the motor.
Standards Alignment
This project addresses the Next Generation Science Standard MS-PS2-3: “Ask questions about data to determine the factors that affect the strength of electric and magnetic forces.” It also aligns well with NGSS Practice 3 (Planning and Carrying Out Investigations) and Practice 4 (Analyzing and Interpreting Data). In addition, this project addresses Common Core math standards involving the analysis of bivariate data, particularly 8.SP.A, HSS.ID.B, and HSS.ID.C.
Photo Gallery