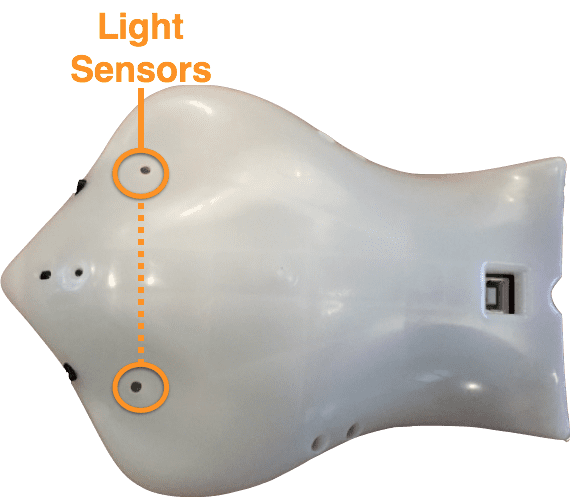
The Finch has two light sensors. These sensors enable you to detect whether the area around the robot is dark or bright. For example, you can write a program to make the robot move forward until it comes to a dark area.
Register to receive free access to all teacher materials.