In the last lesson, you were introduced to some of the sensor blocks for the Finch. In this lesson, you will learn to use those blocks to help the Finch make decisions about what it should do.
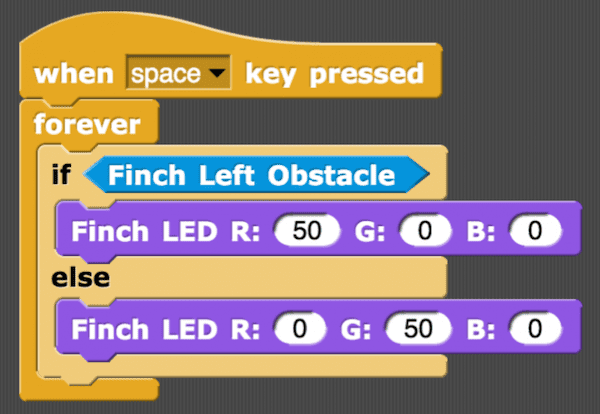
First, consider the Finch obstacle blocks, Finch Left Obstacle and Finch Right Obstacle. These blocks are Boolean blocks. This means that the value of the block is either true or false. If an object is in front of the right obstacle sensor, then the Finch Right Obstacle block is true. Otherwise, it is false. Each obstacle sensor can detect objects about 1-4 inches from the sensor.