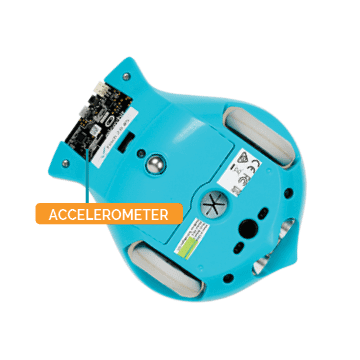
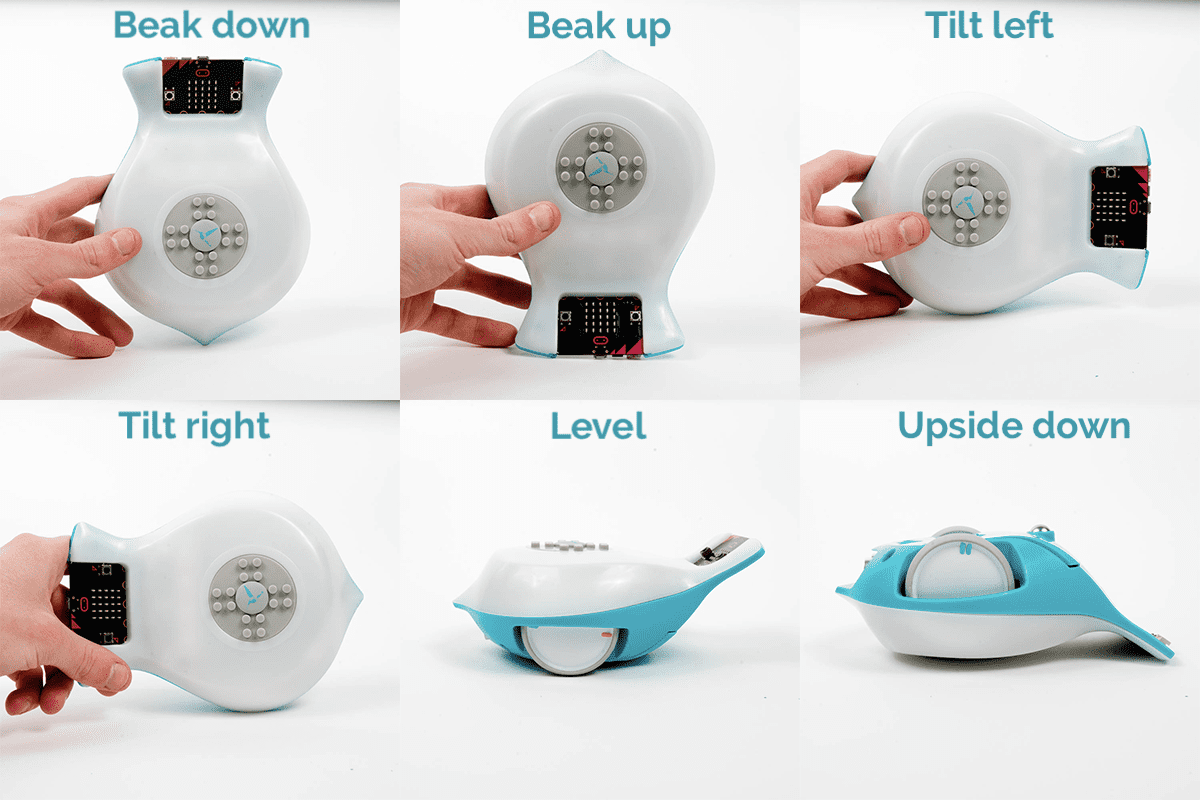
The micro:bit contains an accelerometer. This sensor can be used to measure the orientation of the Finch. For example, you can detect when the Finch is upside down. The micro:bit accelerometer is very similar to the accelerometer that enables a smartphone or tablet to change the screen from portrait to landscape when the user turns the device.
Register to receive free access to all teacher materials.